Главная
Новости
Публикации
Подбор серводвигателя для позиционирования при заданной дискретности перемещения и использовании S-образного профиля скорости
Подбор серводвигателя для позиционирования при заданной дискретности перемещения и использовании S-образного профиля скорости
В этой статье будет идти речь об использовании безредукторной системы (рисунок 1), а именно применение серводвигателя YASKAWA серии SIGMA-5 при преобразовании вращательного движения в поступательное посредством шарико-винтовой передачи без промежуточного звена в виде редуктора. Отличительной особенностью данного расчета является заданная точность отработки перемещения, при установленной дискретности задания, а также использование S-образного профиля скорости при разгоне и торможении привода.
Рисунок 1. Кинематическая схема применения
Данные для расчета
Обозначим условия, а также исходные данные применения:
Скорость нагрузки: ϑ_L=15м/мин;
Масса секции поступательного движения: m=80 кг;
Длина винта l_B " "=0.8 м;
Диаметр винта: d_B=0.016 м;
Шаг резьбы винта: P_B=0.005 м ;
Плотность шарика: ρ=7,87×〖10〗^3 кг/м3;
Передаточное число редуктора: i=1 (прямой привод);
Максимальное время перемещения (позиционирования): tm=1,2 с;
Точность остановки: δ=±0,01 мм;
Коэффициент трения скольжения: μ=0,2;
КПД механики: η=0,9 (90%).
1. Тахограмма линейной скорости
Рисунок 2. Циклограмма линейной скорости
Цикл: t=60/n=60/40=1,5 c.
На циклограмме (рисунок 2) видим, что времена ускорения и торможения имеют равные значения: ta=td, также учтем время ts=0,1 c- S-образный профиль ускорения/торможения:
ta=tm-ts-60l/ϑ_L =1,2-0,1-(60×0,25)/15=0,1c;
tc=1,2-0,1-0,1×2=0,9c.
2.Скорость вращения
Скорость вращения нагрузки: n_L=ϑ_L/P_B =15/0,005=3000 об/мин.
Скорость вращения вала двигателя без редуктора: n_M=n_L×i=3000×1=3000 об/мин.
3.Момент сил сопротивления, прикладываемый к валу двигателя:
В) Допустимый момент инерции нагрузки:20×0,0665×〖10〗^(-4)=1,33×〖10〗^(-4) кг*м2
8.Проверка предварительно выбранного двигателя
Требуемый момент для создания ускорения: T_P=(2π×n_M (J_L+J_M))/60×1/ta+T_L=(2π×3000×(0,0665+1,25)×〖10〗^(-4))/60×1/0,1+0,139=0,552Нм Полученный момент меньше пикового момента двигателя - условие выполнено.
Требуемый момент при торможении:
T_S=(2π×n_M (J_L+J_M))/60×1/td-T_L=(2π×3000×(0,0665+1,25)×〖10〗^(-4))/60×1/0,1-0,139=0,37 Нм Полученный момент меньше пикового момента двигателя - условие выполнено.
Значение эквивалентного момента:
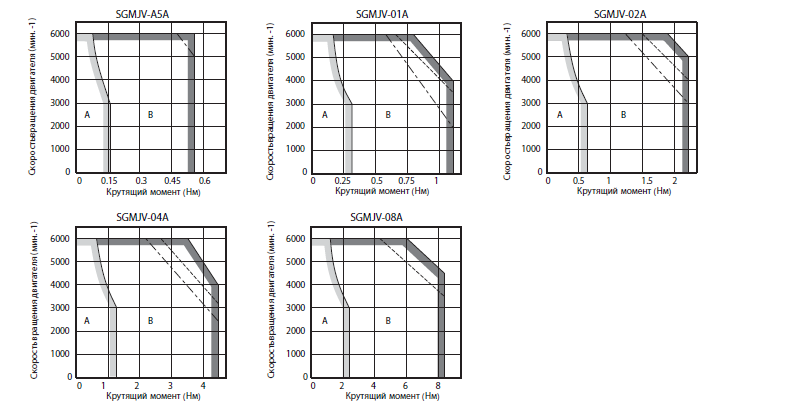
T_rms=√((〖T_P〗^2×ta+〖T_L〗^2×tc+〖T_S〗^2×td)/t)=√((〖0,552〗^2×0,1+〖0,139〗^2×1+〖0,252〗^2×0,1)/1,5)=0,192 Нм Полученный момент меньше номинального момента двигателя – условие выполнено. Характеристики момент скорость серводвигателей YASKAWA SGMJV
9.Результат
Предварительно выбранный серводвигатель соответствует требованиям применения. Следующим шагом следует проверка обеспечения отработки перемещения с заданной дискретностью.
Дискретность задания перемещения: ∆l=0,01 мм/импульс.
Требуемое число импульсов на оборот: P_B/∆l=5/0,01=500 имп/об < разрешение энкодера (1048576 имп/об).
10. Определим частоту задания
vs=(1000 v_L)/(60×∆l)=(1000×15)/(60×0,01)=25000 имп/с – ниже предельной частоты задания.
11. Монтаж реальной системы
При проведении пусконаладочных работ, настоятельно рекомендуется выполнять автонастройку серводвигателя на механику. В этом случае будут доступны лучшие статические и динамические характеристики системы, и, как следствие, обеспечены все желаемые рабочие циклы. Более подробно о влиянии автонастройки на работу системы описано в статье.
Заключение
Полученный результат свидетельствует о соответствии выбранного серводвигателя требованиям системы. Использование безредукторного привода устраняет угловой люфт, тем самым повышает точность позиционирования, а добавление функции S-образной кривой благоприятно сказывается на работе механической составляющей системы. Из расчета видно, что сервоприводы YASKAWA способны обеспечить высокую перегрузочную способность, это позволяет выбирать двигатели на меньший номинал, в сравнении с другими производителями двигателей, но в то же время, обеспечит высокую динамику привода при малых габаритах. Требуемое значение точности остановки и дискретности перемещения легко обеспечивается благодаря высокоточному энкодеру двигателя, а функция автонастройки позволяет отработать этот заложенный ресурс в реальной системе, снижая время при пуско-наладке.